Isochrones and Transport Accessibility¶
Isochrones represent areas reachable from a starting point within a given time limit along a transport network. This function enables analysis of transport accessibility using pedestrian, automobile, public transport graphs, or their combination.
The library offers multiple isochrone generation methods:
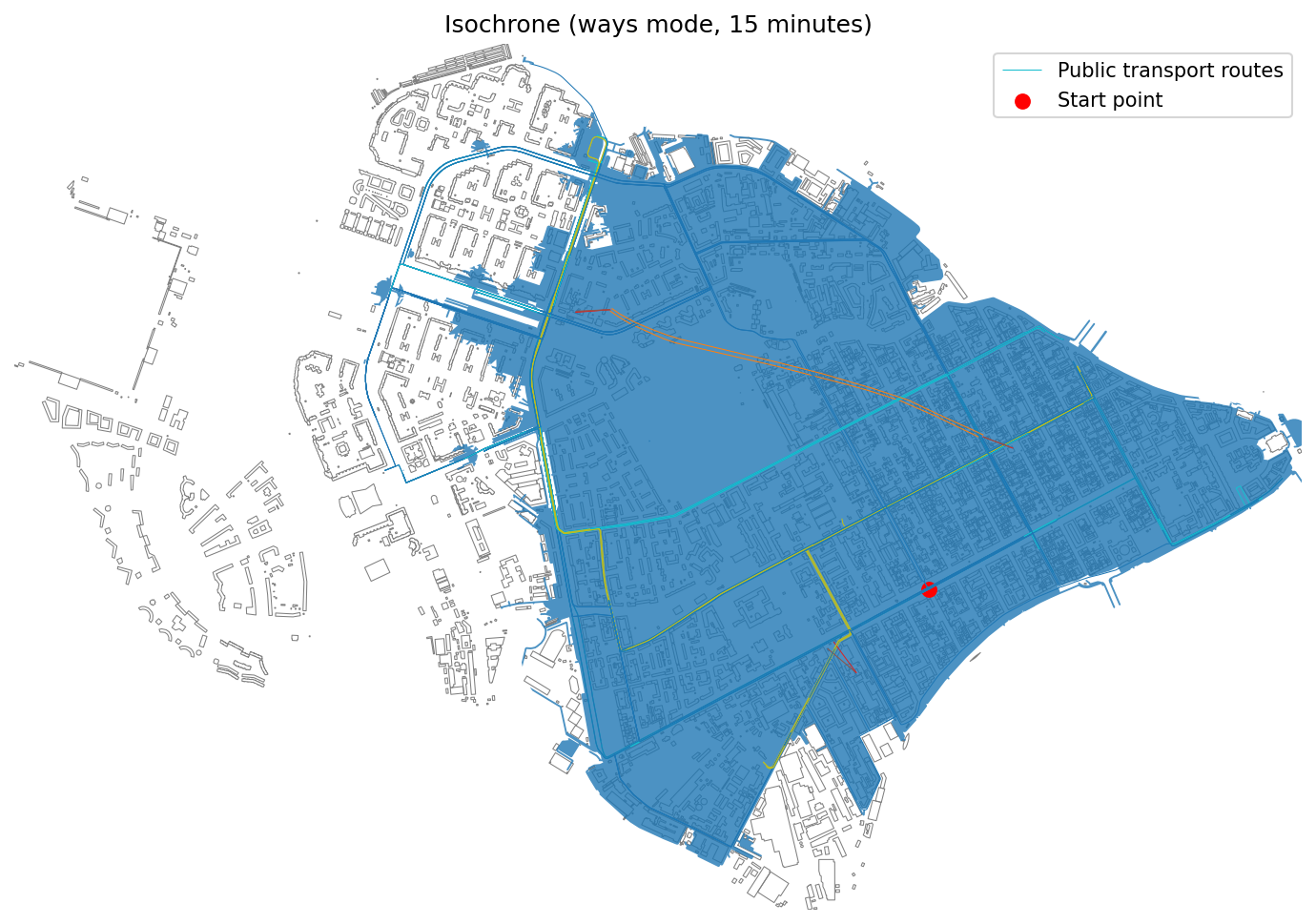
Baseline isochrones¶
Show a single area reachable within a specified time.
objectnat.get_accessibility_isochrones(isochrone_type, points, weight_value, weight_type, nx_graph, **kwargs)
¶Calculate accessibility isochrones from input points based on the provided city graph.
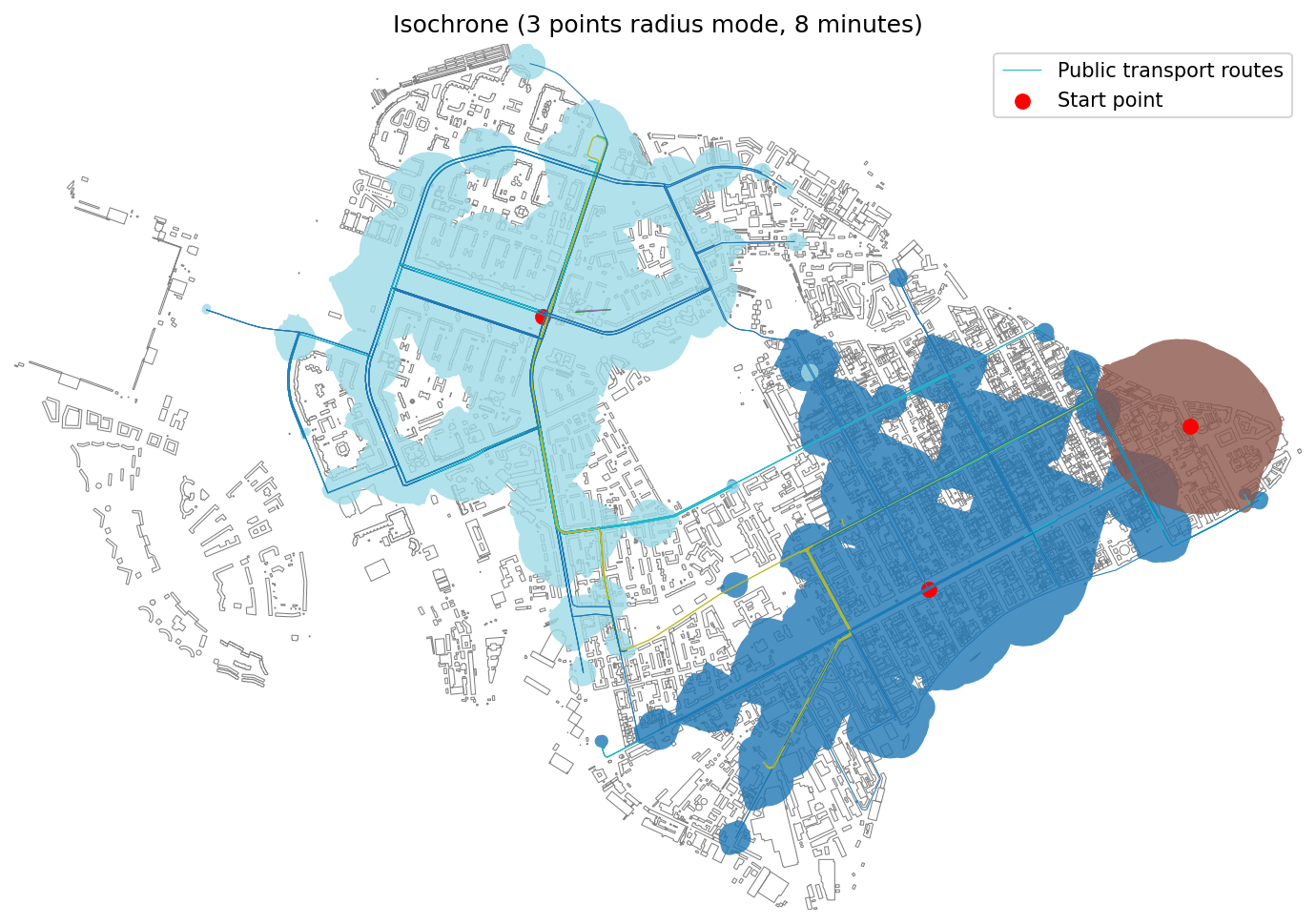
Supports two types of isochrones
- 'radius': Circular buffer-based isochrones
- 'ways': Road network-based isochrones
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
isochrone_type
|
Literal['radius', 'ways']
|
Type of isochrone to calculate: - "radius": Creates circular buffers around reachable nodes - "ways": Creates polygons based on reachable road network |
required |
points
|
GeoDataFrame
|
GeoDataFrame containing source points for isochrone calculation. |
required |
weight_value
|
float
|
Maximum travel time (minutes) or distance (meters) threshold. |
required |
weight_type
|
Literal['time_min', 'length_meter']
|
Type of weight calculation: - "time_min": Time-based accessibility in minutes - "length_meter": Distance-based accessibility in meters |
required |
nx_graph
|
Graph
|
NetworkX graph representing the transportation network. Must contain CRS and speed attributes for time calculations. |
required |
**kwargs
|
Any
|
Additional parameters: - buffer_factor: Size multiplier for buffers (default: 0.7) - road_buffer_size: Buffer size for road edges in meters (default: 5) |
{}
|
Returns:
| Type | Description |
|---|---|
tuple[GeoDataFrame, GeoDataFrame | None, GeoDataFrame | None]
|
Tuple containing: - isochrones: GeoDataFrame with calculated isochrone polygons - pt_stops: Public transport stops within isochrones (if available) - pt_routes: Public transport routes within isochrones (if available) |
Source code in src\objectnat\methods\isochrones\isochrones.py
138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 | |

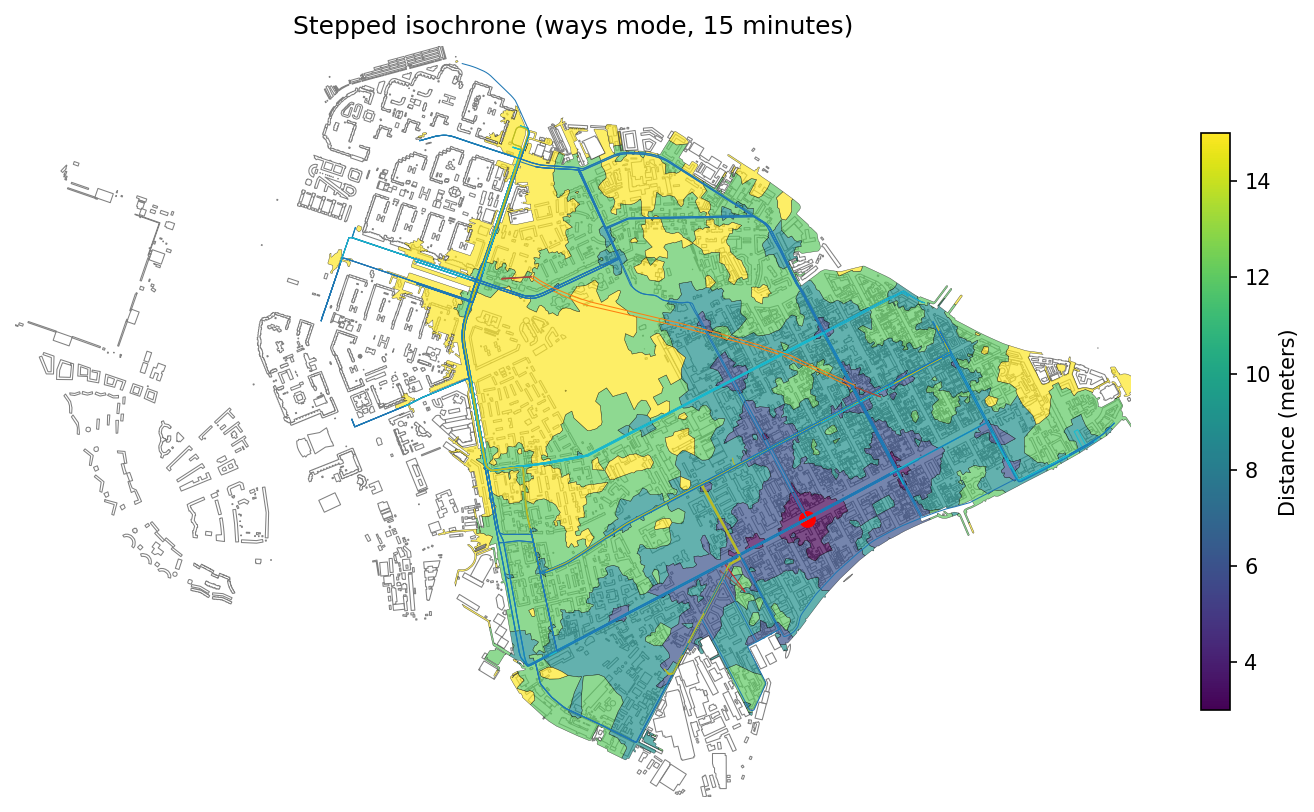
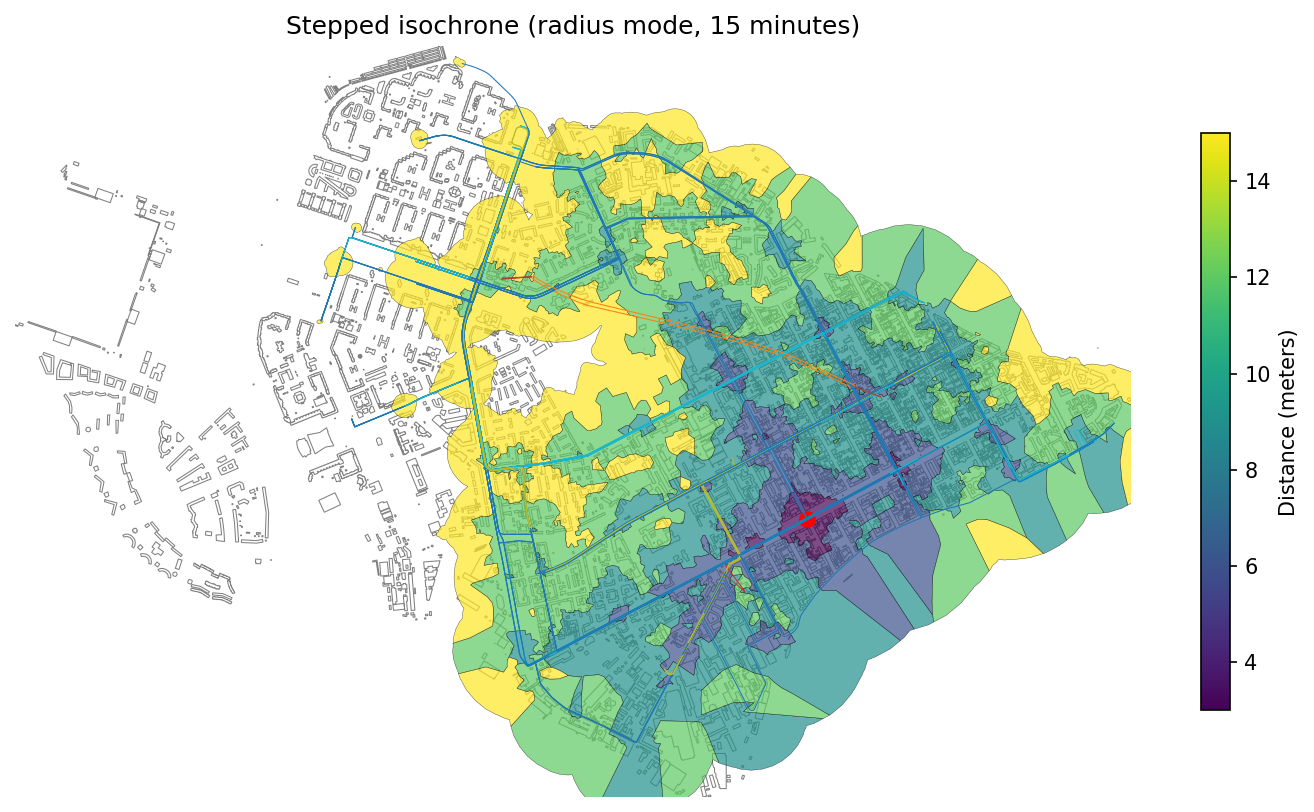
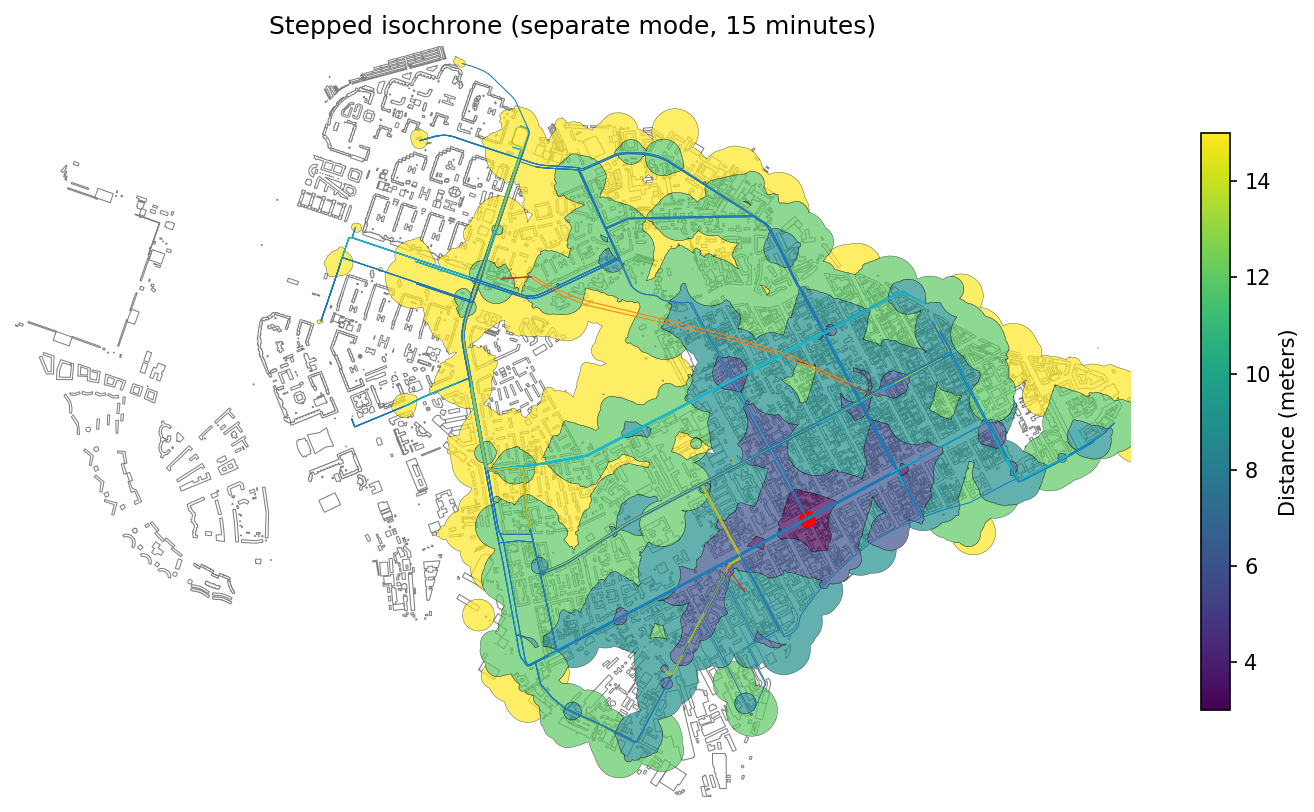
Stepped isochrones¶
Show accessibility ranges divided into time intervals (e.g., 5, 10, 15 minutes).
objectnat.get_accessibility_isochrone_stepped(isochrone_type, point, weight_value, weight_type, nx_graph, step=None, **kwargs)
¶Calculate stepped accessibility isochrones for a single point with specified intervals.
Parameters:
| Name | Type | Description | Default |
|---|---|---|---|
isochrone_type
|
Literal['radius', 'ways', 'separate']
|
Visualization method for stepped isochrones: - "radius": Voronoi-based in circular buffers - "ways": Voronoi-based in road network polygons - "separate": Circular buffers for each step |
required |
point
|
GeoDataFrame
|
Single source point for isochrone calculation (uses first geometry if multiple provided). |
required |
weight_value
|
float
|
Maximum travel time (minutes) or distance (meters) threshold. |
required |
weight_type
|
Literal['time_min', 'length_meter']
|
Type of weight calculation: - "time_min": Time-based in minutes - "length_meter": Distance-based in meters |
required |
nx_graph
|
Graph
|
NetworkX graph representing the transportation network. |
required |
step
|
float
|
Interval between isochrone steps. Defaults to: - 100 meters for distance-based - 1 minute for time-based |
None
|
**kwargs
|
Any
|
Additional parameters: - buffer_factor: Size multiplier for buffers (default: 0.7) - road_buffer_size: Buffer size for road edges in meters (default: 5) |
{}
|
Returns:
| Type | Description |
|---|---|
tuple[GeoDataFrame, GeoDataFrame | None, GeoDataFrame | None]
|
Tuple containing: - stepped_isochrones: GeoDataFrame with stepped polygons and distance/time attributes - pt_stops: Public transport stops within isochrones (if available) - pt_routes: Public transport routes within isochrones (if available) |
Source code in src\objectnat\methods\isochrones\isochrones.py
22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 | |